|
 |
|
|
|
|
|
|
|
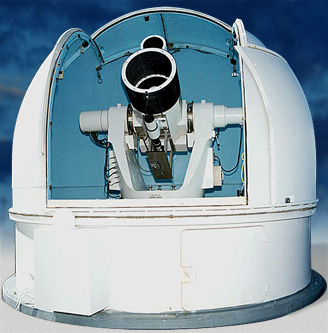
Super Radot Tracking Mount |
|
|
| |
|
|
| |
| |
The
original RADOT Tracking Systems were developed by Photo-Sonics, Inc. for
the United States Army Kwajalein Missile Range (USAKMR) approximately 10 to 15
years ago. The RADOTs in use are
capable of collecting TSI component data to a very high degree of accuracy using
a multiple-station solution technique.
The basic design requirement for the Super Radot includes a
base assembly which contains the azimuth drive motor, tape cables, and the
azimuth carriage assembly. The
elevation axis is comprised of the elevation drive motors and the payload
carrying platforms. A separate
control console is located adjacent to the mount.
The Super Radot provides smooth, vibration-free tracking within the range
of ±540° in azimuth and -10° to +95° in elevation.
The pedestal is enclosed in an Astrodome shelter.
Electrical and electronic facilities required to operate the mount are
incorporated into a local console within the Astrodome and a remote console
located in a control room which also houses a computer and Tracking Error
Detector System (TEDS) that automatically maintains target tracking once a
target is acquired. In addition to
TEDS, the system also operates in manual tracking mode, controlled by a stick
controller located in the control room and also in computer mode, which uses
pedestal position data and external target data to produce a tracking error
signal.
|
|
| |
|
|
|
| |
 |
|
| |
|
|
| |
| |
 |
|
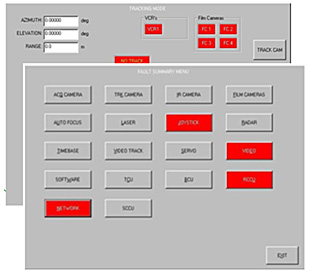
Control Software — The ARGUS control
software
provides all the functionality the user
would expect of
an advanced TSPI tracking system. It provides a
single interface for the tracking pedestal,
sensors,
auto-tracking, radar, calibration, target simulation
and
diagnostics of the complete tracking system. Control of
the
system is simplified via an intuitive touch screen
GUI. The standard ARGUS application can control up to
10
sensor stations, in addition to radar and lasers,
allowing
a
single-operator complete control of all
aspects of a complex
and highly capable system from
a remote location. It also
provides the control of single
and dual-gate auto trackers
and fixed focal length and
zoom lenses and focus tables.
Automated Star
Calibration are incorporated to yield the
highest TSPI
accuracy of any optical tracking system
manufactured today.
Visit the ARGUS software page. |
|
|
| |
|
|
| |
|
General Specifications |
|
Size |
92"L x 82"W x 85.6"H
(plus 18"
trailer tongue) |
|
Weight |
Mount - 6,240 lbs. (no payload) |
|
Payload |
1,000 lbs. total |
|
Travel |
Azimuth
- ± 540 degrees, 1080 degrees total, 3 revolutions total
Elevation
- Working range - 105 degrees (-10 declination to +95 inclination)
Elevation - Plunge range - 200 degrees (-10 declination to +190
inclination) |
|
Torque |
Azimuth - 1 x 1800 ft. lbs. Permanent magnet motor
Elevation
- 2 x 300 ft. lbs. Permanent magnet motors |
Acceleration
(with 600- pound payload) |
Azimuth
- Greater than 3 radians per second per second
Elevation
- Greater than 4 radians per second per second |
|
Velocity |
Azimuth
- 2 radians per second
Elevation -
1 radians per second |
|
Breakaway
Torque |
Azimuth - Less than 20 foot-pounds
Elevation
- Less than 15 foot-pounds |
|
Dynamic Range |
1000:1 |
Bandwidth
(with 600-
pound payload) |
Azimuth
- TBD Hz.
Elevation
- TBD Hz. |
|
Non-orthogonality |
Less
than ±5 arc seconds |
|
Bearing
Wobble |
Azimuth
- Less than ±5 arc seconds
Elevation
- Less than ±5 arcseconds |
|
Power
Requirements |
208 VAC, 60 Hz, 3 Phase
Total peak power 8.0 KVA providing 1800 ft. lbs. |
| |
|
| |
|
|
| |
|
|
|
|
|
|
|
< back to top> |
| |
|
© 2019 Photo-Sonics, Inc. |
| |
| |